Department of Marine Science
C-DEBI Catalina ROV
Here you can find instructions for building a “Catalina” educational ROV, the design and development of which was funded by the National Science Foundation (NSF) through the Center for Dark Energy Biosphere Investigations (C-DEBI) and is therefore in the public domain. The information provided in these pages can help you build your own Catalina ROV, or, if you’d prefer, you can use this design information as a starting point for your own independent design(s).
NSF acknowledgement and disclaimer
This material is based upon work supported by the National Science Foundation under Grant No. OCE-0939564. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Safety
These pages summarize the tools and materials we used to build these ROVs; however, it does NOT provide lessons on how to use those tools or materials safely. This is an intermediate to advanced ROV project, and familiarity with safe use of the tools and materials described herein is assumed. Many of these tools (especially the power tools) and some of the materials are capable of causing serious injury or death and should only be used with qualified instruction and/or supervision. Remember, you are ultimately responsible for your own safety. Seek assistance from those with proper training and experience before using any new tool or material.
Overview of the Catalina ROV system
The acronym “ROV” stands for Remotely Operated Vehicle and is most frequently applied to remotely controlled machines or robots that are used underwater to make observations or perform other types of underwater work. Unlike a submarine or submersible, they do NOT have people inside the vehicle or even in the water. Rather, the pilot operating the vehicle typically remains above the surface of the water. The pilots of large commercial, scientific, or military ROVs commonly control them from a dedicated ROV control room aboard a ship or oil platform. The small, education-oriented Catalina ROVs are designed to be controlled by students from a dock, wharf, swimming pool deck, or small boat.

The Catalina ROV system is made up of three major subsystems pictured above: The “pilot’s console” is the white plastic cutting board with a bunch of stuff mounted on it visible at lower left in the photo. The “ROV” proper is the yellow thing at lower right in the photo. The “tether” is the long, wrapped, bundle of wires connecting the pilot’s console to the ROV.
The ROV is the “business end” of this operation. It’s the remotely controlled part that goes under water and explores the underwater world in response to commands issued by the pilot through the pilot’s console. The ROV consists of a PVC pipe frame (here painted yellow) upon which are mounted a video camera, some LED lights, and “” made by mounting model boat propellers on waterproofed electric motors. The thrusters, which are controlled by the pilot, push the ROV through the water while the video camera sends a live video image of the underwater world back up to the pilot on the surface.
The pilot’s console includes a gaming joystick, which the pilot uses to steer the ROV, as well as a battery to power everything, a box of electronics, and a TV monitor with a black sun shade. All of these components are mounted on a white plastic cutting board to keep them organized.
The tether is the long bundle of wires that connects the pilot’s console with the ROV. It carries commands from the pilot down to the ROV. It also carries video signals from the ROV’s camera back up to the small TV monitor on the pilot’s console, so the pilot can see what the ROV’s camera is pointed at.
How to Build the Catalina ROV system
Now that you have an overview of the entire Catalina ROV system, check out the following pages for more detailed information about how to construct these Catalina ROVs:
- List of Parts and Supplies
- Power System
- Pilot’s Console
- Tether
- ROV Frame
- Camera System
- Propulsion
- Thrusters
- Control System
- Lighting System
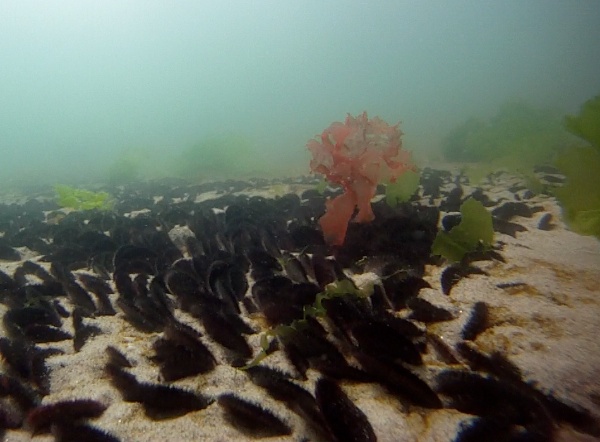
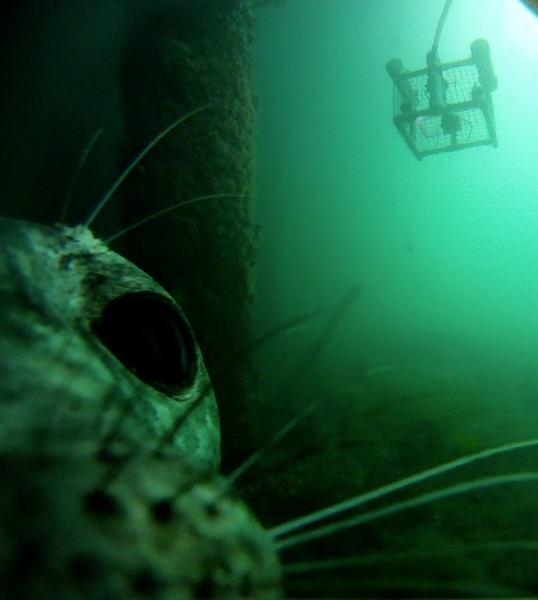
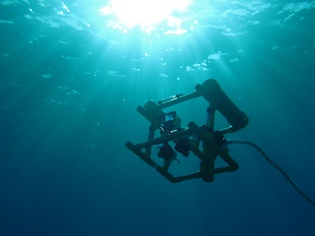
Image gallery
These are some of the images that have been captured from video frames recorded during dives made with the Catalina ROVs.