Department of Marine Science
Projects
Most research projects in the EEL fall into one or more of three broad categories:
- Exploration and characterization of near-shore mesophotic or “twilight zone” microhabitats in the 20-150m depth range
- Physical ecology and biomechanics of marine organisms living in this twilight zone
- Custom design and construction of low-cost electronic or robotic technologies to facilitate study of twilight zone marine life and habitats
Current Projects
Documentation of Wrecks and Reefs through ROV-based 3D Photogrammetry

In collaboration with the Monterey Bay National Marine Sanctuary, we are developing methods for using small ROVs to gather video data for generating accurate 3D photogrammetry models of maritime heritage sites, including shipwrecks, particularly those that are below safe scuba diving depths. The long-term goal is to be able to revisit historically, culturally, or ecologically significant maritime heritage sites repeatedly to document any changes in the physical condition of these sites, which the Sanctuary is responsible for managing. We are also evaluating the techniques to see if they can be used to document changes in biological communities growing on rocky reefs or wrecks at mesophotic depths.
Spawning Site Selection by California Market Squid

California Market Squid (Doryteuthis opalescens) are ecologically important as both predators and prey, and they comprise one of the most important commercial fisheries in California, yet the factors that control exactly when and where these animals aggregate to breed and lay their eggs remain poorly understood. In an effort to learn how to "think like a squid," the EEL has begun to correlate habitat characteristics with squid egg laying sites. We have also collaborated with the Gilly Lab at Hopkins Marine Station to develop and deploy underwater camera systems to record mating and egg-laying behavior of D. opalescens off Cannery Row. CSUMB’s Undergraduate Research Opportunities Center (UROC) has provided the EEL with a precision oxygen sensor, so EEL students can study how occasional, naturally occurring pulses of low-oxygen water affect the behavior of the squid and the survival of their eggs. With funding from C-DEBI and a CSU Faculty Support Grant for Engaging Undergraduates in Coursework Related Research, students in the EEL-affiliated course MSCI 337 developed two programmable, time-lapse video camera systems, called SquidPods to study the squid. In this photo, captured by one of the SquidPods, you can see squid breeding above their egg capsules.
Carmel Submarine Canyon Microhabitat Characterization
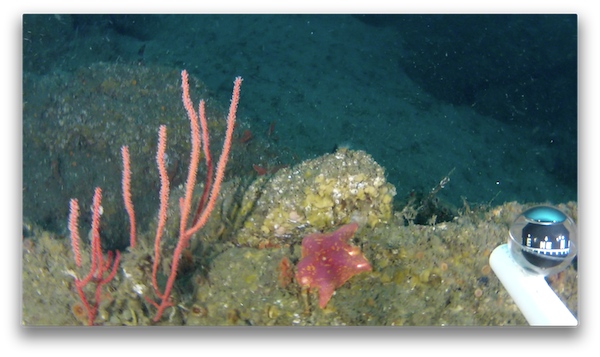
The Carmel Submarine Canyon (CSC) is a side branch of the well-known Monterey Submarine Canyon. The head of Carmel Canyon supports an amazing range of microhabitats and fascinating marine life, but it is exposed to open ocean conditions, making routine access somewhat challenging. We are developing custom technologies to make routine visits to this site possible, so that we can do a better job of documenting the dynamic changes that occur here. We kicked off this long-term study with small ROVs and small in-situ instrumentation platforms developed in the EEL with funding from NSF’s Center for Dark Energy Biosphere Investigations. This photo was taken by our student-built ROV "Ulithi." It shows a red gorgonian coral and bat star living on a rocky slope in the Carmel Submarine Canyon.
Past projects
Pulley Ridge Expedition

During the summer of 2015, EEL students Lauren Boye and Samantha Whitney joined Professor Moore and other scientists on an 11-day oceanographic cruise to characterize the biodiversity of Pulley Ridge, which is believed to be the deepest coral reef in U.S. waters. Using EEL's "Ulithi ROV," they obtained video footage of fish and invertebrates in water about 60 m (200 feet) deep in the Gulf of Mexico. The work was done in collaboration with two other teams on the cruise: an AUV team headed up by Dr. Arne Diercks (University of Southern Mississippi) operating the autonomous underwater survey vehicle "Mola mola" and a technical diving team lead by Dr. Marc Slattery (University of Mississippi) using rebreathers. Working together, the three groups conducted detailed surveys of several distinct sites.
Ulithi reef conservation project

For countless generations, the people of Ulithi Atoll in Micronesia have obtained enough food and water from their islands and coral reefs to sustain their traditional culture. But changes brought about by WWII, sea level rise, and a gradual loss of traditional knowledge have made sustainability more difficult. In 2013, and again in 2016, EEL students were invited to join a team of dedicated reef ecologists, fisheries scientists, and native Ulithi islanders who are working together to better understand and manage Ulithi's living marine resources. The collaboration is called One People, One Reef. The EEL developed and used specialized ROVs and camera stations to gather information about fish populations and coral reef health from parts of Ulithi’s fore reefs and inner lagoon that are otherwise too deep to access for study. In this photo, fishermen from the Ulithi island of Falalop use a net to capture reef fish for food.
C-DEBI Educational ROVs

The Center for Dark Energy Biosphere Investigations has funded EEL students to develop of a small fleet of ROVs for outreach and education activities at the middle school through college levels. Young scientists can use these ROVs to explore marine life from a wharf, dock, or even a kayak. Three of these vehicles are based at the Wrigley Marine Science Field Station on Catalina Island. Three others support educational programs in the Monterey Bay area. Each ROV features precision joystick control, lights for night dives, and high-definition video recording. Here one of the ROVs checks out a sea star under the Monterey wharf.

In a second year of productive collaboration with the Ocean Gate Foundation, CSUMB students in Professor Moore's robotics class and EEL students were able to test their design for a new ROV camera and lighting system designed to operate at depths of 100 meters (about 330 feet). The camera system (metal cylinder in lower left of photo) was attached to the front of Ocean Gate's Antipodes submersible and tested during an awesome dive to the wreck of the Art Reidel. The ship's anchor, visible in this photo taken from inside Antipodes, rests on the bottom in 300 feet of water. The student's camera system test was only partially successful, so the students learned some valuable lessons that will improve the final ROV design.

Through a fabulous collaboration with the Ocean Gate Foundation, CSUMB students in Professor Moore's robotics class and EEL students got a unique opportunity to develop some remote controlled equipment for a submersible (small submarine) called Antipodes. The devices included a water sampler, a gripper arm, a flashing LED display (nicknamed Squid Disco by the sub pilot), and a TV remote control that could be used to control the other devices from inside the submarine. The TV remote successfully operated the Squid Disco lights during a dive to a depth of over 900 feet! The photo shows student Josh Ambrose climbing into the sub.

CSUMB students in Professor Moore's Robotics class were able to use EEL tools and expertise to build a super-fun class project. Their creation, called “Surfbot” is an autonomous (self-controlled) surfboard equipped with propellers, GPS navigation, and a modified fish finder used as a depth gauge to map nearshore undersea terrain. With it, the students were able to locate a sunken sailboat and a sunken amphibious military vehicle off of Del Monte Beach in Monterey. In spite of its name, Surfbot doesn't surf very well, but it does pave the way for future EEL autonomous vehicle projects.

With generous funding from the Charles A. and Anne Morrow Lindbergh Foundation, EEL has developed a set of portable, solar-powered, Internet accessible, motion-activated, wildlife surveillance cameras that can be deployed by school children for periods of 1-2 weeks in remote areas frequented by wildlife. The kids can use this equipment to answer their own questions about wildlife behaviors and habitat preferences, while learning about technology and science at the same time.
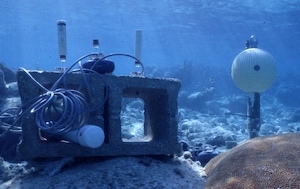
EEL students are developing low-cost instruments that can be deployed in arrays on or near reefs (temperate or tropical) to measure and record both spatial and temporal variations in physical microhabitat conditions. Changes in conditions can then be compared with the movements of fish or other animals to test hypotheses about why particular reef animals are where they are at specific times. EEL students are working on incorporating sensors for temperature, water flow velocity, light levels, and other ecologically important parameters.
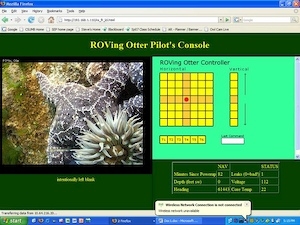
ROVing Otter is a small, undersea Remotely Operated Vehicle (ROV) designed and built by the EEL team to be piloted by school children via the Internet. By logging on through a standard web browser and using mouse-clickable controls, the kids can steer the vehicle through a real kelp forest while viewing live video of undersea life from the ROV’s camera. Successfully prototyped with funding from WeTEC and deployed and tested at Point Lobos State Reserve in collaboration with the California State Park System, this exciting project is presently taking a break and awaiting further funding to improve its reliability and increase access to more schools.

CMS Owl Cam is a science education project conducted in collaboration with Mark Stromberg of Hastings Natural History Reservation and Craig Hohenberger of Carmel Middle School. Although the camera is not operating at the present time, it has archived over 100,000 still web-camera images taken at regular intervals from inside a Barn Owl nest box, mostly in 2004. Middle school students and others can access the image archives via the web and analyze the images to answer their own questions about the nesting behavior of wild Barn Owls.
All images © Dr. Steven W. Moore